-

AMR
AMR trolleýsi, bellenen ýol ugrunda gezip bilýän, howpsuzlygy goramak we dürli geçiriş funksiýalaryna eýe bolan elektromagnit ýa-da optiki ýaly awtomatiki ýolbelet enjamlary bilen enjamlaşdyrylan ulag serişdesidir. Senagat goşundylarynda sürüjini talap etmeýän ulag serişdesidir. Kuwwat çeşmesi zarýad berilýän batareýa.
Suw astyndaky AMR: material ýük awtoulagynyň düýbüne siňip, material eltip bermek we gaýtadan işlemek amallaryny amala aşyrmak üçin awtomatiki gurnaň we aýryň. Dürli ýerleşiş we nawigasiýa tehnologiýalaryna esaslanyp, adam sürmegini talap etmeýän awtomatiki ulaglara köpçülikleýin AMR diýilýär.
-

Palletizator
Palletizator maşynlaryň we kompýuter programmalarynyň organiki birleşmesiniň önümidir modern häzirki zaman önümçiliginiň netijeliligini ýokarlandyrýar. Paletizasiýa maşynlary palletizasiýa pudagynda giňden ulanylýar. Robotlary paletleşdirmek zähmet çykdajylaryny we pol boşlugyny ep-esli tygşytlap biler.
Palletizasiýa edýän robot çeýe, takyk, çalt, täsirli, durnukly we täsirli.
Palletizasiýa edýän robot ulgamy kiçi aýak yzy we kiçi göwrümli artykmaçlyklara eýe bolan koordinat robot enjamyny ulanýar. Netijeli, täsirli we energiýa tygşytlaýan doly awtomatlaşdyrylan blok maşynlaryny ýygnamak liniýasyny döretmek pikiri durmuşa geçirilip bilner.
-

Gatyk bukulýan maşyn
Gatnaşyk bukulýan maşyn, awtomatiki enjam bolup, oňa kod lýubkasy hem diýilýär, dürli konweýerler bilen birleşdirilip, geçiriji liniýa boş gaplary paýlamak üçin lýuboý ulgamynda ulanylýar. Gatnaşyk bukulýan maşyn, paletleri berkitmek üçin paletleri berkitmek üçin ulanylýar, şol sanda: paletli berkitme goldaw gurluşy, palet göteriji stol, ýük datçigi, paletiň ýagdaýyny kesgitlemek, robot datçigini açmak / ýapmak, götermek, aşaky, merkezi pozisiýa.
-

RGV
RGV demir ýol ulagy diýmekdir, oňa trolleý hem diýilýär. RGV dürli ýokary dykyzlykly ammarlarda ulanylýar we geçelgeler ammaryň saklaýyş kuwwatyny ýokarlandyrmak üçin islendik uzynlyga görä dizaýn edilip bilner. Mundan başga-da, işleýän wagtyňyz forkliftiň zolakly ýoldan girmeginiň zerurlygyndan peýdalanyp bilersiňiz, trolleýbusyň zolakly çalt hereket etmegi bilen ammaryň işleýiş netijeliligini ýokarlandyryp we has ygtybarly edip bilersiňiz.
-

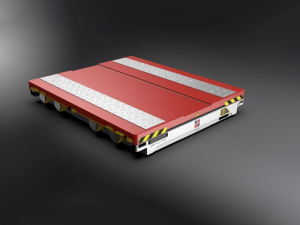
4D gatnaw ulgamlarynyň standart görnüşi
Dört taraplaýyn awtoulag akylly intensiw ammaryň esasy enjamlary hökmünde dik we gorizontal awtoulag esasan teker ýygnamakdan, elektrik ulgamyndan, elektrik üpjünçiligi ulgamyndan, hereketlendiriji ulgamdan, gaplaýyş ulgamyndan, datçik ulgamyndan we ş.m.
-

Pes temperatura üçin 4D gatnaw ulgamlary
Geçiş zolagynyň pes temperatura görnüşiniň gurluşy, adaty wersiýa bilen deňdir. Esasy tapawut dürli iş gurşawynda. Geçiş zolagynyň pes temperatura görnüşi esasan - 30 the gurşawynda ulanylýar, şonuň üçin içerki material saýlamasy gaty üýtgeşik. Internalhli içerki komponentleriň pes temperatura garşylygy bar, batareýa -30 ° C gurşawda zarýad bermegi goldaýan pes temperaturaly ýokary öndürijilikli batareýa. Mundan başga-da, tehniki hyzmat ammardan çykanda kondensasiýa suwunyň öňüni almak üçin içerki gözegçilik ulgamy möhürlenendir.
-

Speedokary tizlikli ulanmak üçin 4D gatnaw ulgamlary
Wertikal we keseligine awtoulagyň ýokary tizlikli wersiýasynyň mehanizmi, adaty dik we keseligine maşynyňky bilen deňdir, esasy tapawut pyýada tizliginiň gowulaşmagyndadyr. Taslamanyň umumy netijeliligini ýokarlandyrmak we ulanylýan çatryklaryň sanyny azaltmak üçin deňeşdirilende yzygiderli we durnukly palet önümlerini göz öňünde tutup, çatrykyň ýokary tizlikli görnüşi teklip edilýär. Walkingöreýiş tizliginiň görkezijisi adaty wersiýadan iki esse köpdür we süýşmegiň tizligi üýtgemez. Howpsuzlygy ýokarlandyrmak üçin howpuň ýokary tizlikli işlemeginiň öňüni almak üçin enjamlara howpsuzlyk lazeri ýerleşdirildi.
-
Agyr ýüklemek üçin 4D gatnaw ulgamlary
Agyr ýük geçelgesiniň mehanizmi, adaty wersiýa bilen deňdir, esasy tapawudy, ýük göterijiliginiň ep-esli gowulaşmagydyr. Onuň göterijilik ukyby adaty wersiýadan takmynan iki esse ýeter we degişlilikde degişli işleýiş tizligi hem peseler. Pyýada ýöremek we kakmak tizligi hem azalar.
-

4D gatnawlar üçin dykyz racking
Dört taraplaýyn intensiw ammar tekjesi esasan raf böleklerinden, Sub-kanal çyzyklaryndan, Sub-kanal ýollaryndan, gorizontal galstuk enjamlaryndan, esasy kanal geçelgelerinden, Esasy kanal ýollaryndan, taýaklaryň we ýeriň birikdirilmegi, sazlanyp bilinýän aýaklar, arka torlar, gorag torlary, tekjeleriň esasy materialy Q235 / Q355 we çig mal we Baosteel-iň çig malydyr.
-

Speedokary tizlikli ýokarlandyryş ulgamy
Iki taraplaýyn palet lifti esasan hereketlendiriji enjam, göteriji platforma, agram agramy deňagramlylygy bloky, daşky çarçuwa we daşky mesh ýaly esasy böleklerden durýar.
-
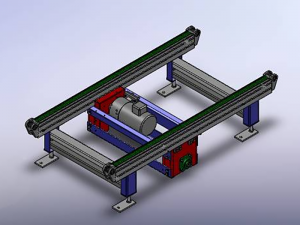
Maglumat 4D gatnaw konweýer ulgamy
Motor hereketlendiriji toparyň üsti bilen hereketlendiriji wilkany herekete getirýär we hereketlendiriji wilka paletiň iberiş funksiýasyny durmuşa geçirmek üçin geçiriji zynjyry herekete getirýär.
-

WCS-ammar dolandyryş ulgamy
WCS ulgamy ulgam bilen enjamlaryň arasyndaky meýilnamalaşdyrmak üçin jogapkärdir we WMS ulgamy tarapyndan berlen buýruklary utgaşdyrylan iş üçin her enjama iberýär. Enjam bilen WCS ulgamynyň arasynda üznüksiz aragatnaşyk bar. Enjam ýumuş gutarandan soň, WCS ulgamy WMS ulgamy bilen maglumatlary ýerleşdirmegi awtomatiki ýerine ýetirýär.